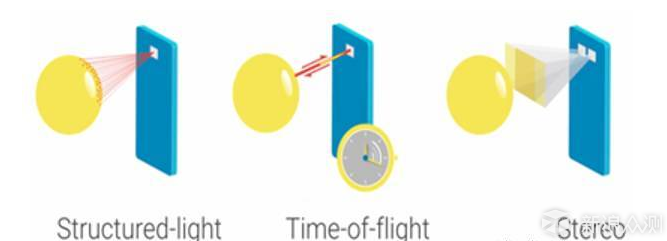
自从iPhone X的问世,从而开始了手机3D人脸识别元年。从专业角度来讲3D人脸识别技术是通过3D摄像头立体成像,能够识别视野内空间每个点位的三维坐标信息,从而使得计算机得到空间的3D数据并能够复原完整的三维世界,并实现各种智能的三维定位。现在相当一部分安卓机也具有人脸识别解锁,但其实大多采用的是照片识别,呵呵,专业术语称为2D面部识别。可你知道吗?即便都是3D人脸识别也是有不同方案的,目前市场上有三种主流方案,它们分别是3D结构光方案(Structured Light)、ToF 3D方案(Time Of Flight,时差测距技术)和双目立体成像方案(Stereo System)。那么这三种3D人脸识别技术哪家强呢?在文中涧亭将为大家展开剖析这三种方案的不同特点和优缺点。
三种方案工作原理
结构光(Structured Light)
结构光其实就是投射特定的光信息到物体表面后再由摄像头采集。根据物体造成的光信号的变化来计算物体的位置和深度等信息,进而复原整个三维空间。已经上市的手机中采用这种方案的有iPhone X、小米 8透明探索版和 OPPO Find X。
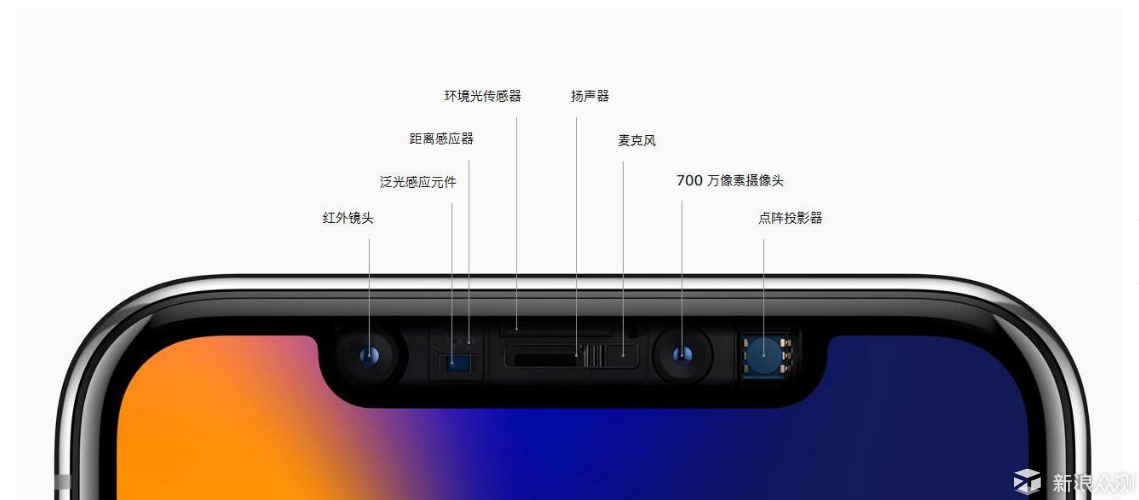
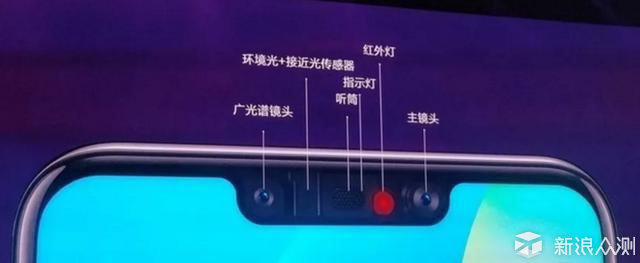
iPhone X刘海组建
其实苹果早在2010年就以2900万美元收购了瑞典的Polar Rose公司,一家具备独有的人脸识别技术的小公司。在当时业内就预料到苹果将推出Face ID以取代过去的Touch ID成为新的的安全加密手段,不过大家都没想到苹果公司经过七年磨一剑才在iPhone X上应用了这项让圆形Home键寿终正寝的技术,成为首个去掉指纹识别只保留人脸识别的产品。iPhone X刘海中藏有八个组件,小米8透明探索版和OPPO Find X在人脸识别的核心组件方面基本与其相同,iPhone X前置的距离传感器与环境光传感器组件通过3D结构光技术,根据所处环境的明暗向点阵投影器发出发射不同强度的红外线指令,而且多达3万束,之后红外镜头读取点阵图案,扑捉脸部信息再将图像与系统存储进行比对确认是否匹配,因为红外线作为一种不可见光所以可以有效的克服使用者周边环境的过亮、过暗等不利影响。小米8透明探索版则是首款搭载“Face ID”身份识别的安卓手机,同样基于3D结构光技术,可投射33000个编码点阵来获取面部深度信息,创建脸部毫米级3D面部模型,当然这两者还是有点差异的,在这个章节的最后面我会讲到。

小米8刘海组建
可能有人会问,不明白小米8透明探索版和小米8的人脸识别到底有什么区别呢,看着和用着没什么呀?从刘海的组件可以看到小米8比iPhone X和小米8透明探索版少了关键的点阵投影器,而这是在面部实现编码点阵的关键,没有了这个玩意就只能是2D层面的技术,只是单纯的红外成像然后提取4096个人脸特征点,将其同已经录入的红外面部数据进行特征匹配比对,无论从技术层面还是精确度、安全性的角度来说这两款机子所采用的都不是一个等量级的方案。

OPPO Find X双轨潜望结构组件
OPPO Find X独有的双轨潜望结构使得机身外型很是惊艳,双轨潜望结构0.6秒的升起速度还是蛮快的,人类眨一下眼睛的时间大概是0.3秒,也就眨俩下眼睛的时间吧。在这个双轨潜望结构之上除了放置前后摄像头外,还搭载了OPPO Facekey 3D结构光,通过向人脸投射15,000个物理点、达到30万的分辨率,软件端实现精度达到正负0.6毫米的级别的3D深度图,并以100毫秒的算法速度快速与脸部的2048个维度进行比对解锁。
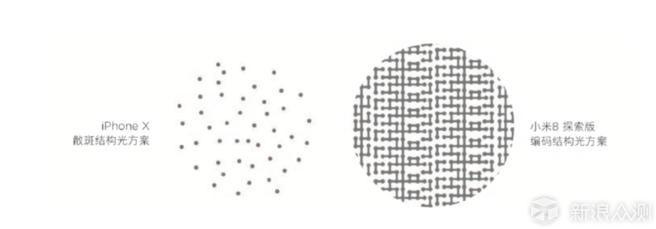
散斑结构光和编码结构光图例
现在要说到这三款手机虽然同为光结构手机但其实在技术方面还是有差异的,3D结构光又分为编码结构光和散斑结构光, 前者是通过mask形成编码图案,优点是算法简单,缺点是功耗大,小米8透明探索版采用的就是这种技术;后者是通过二元光学 器件形成散斑,优点在于透过率高、能耗低,缺点是对于技术能力的要求非常高,iPhone X和OPPO Find X均是这种模式。这其实也是设计不尽相同的点阵投影器组件造成的,相同的是三款手机都号称人脸识别的错误识别率仅在百万分之一。
可以预见结构光这种方案在未来的优势还是很有前景的,可拓展空间更加广阔,比如5G通信、AR以及其他与3D建模等相关的领域都可以发挥它独有的关键作用。不过 3D 结构光也有它的局限,相比传统的摄像头,3D 结构光可以工作的距离要短一些,最长距离一般在 1 米左右,OPPO给出的数据是60cm远精度也能控制在±1mm范围,当然这个距离对人脸解锁是绰绰有余的。
ToF 3D方案(Time Of Flight,时差测距技术)
TOF是Time of flight的简写,直译为飞行时间的意思。ToF 3D方案就是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来判断目标物距离。2018年6月在上海2018 MWC上,vivo正式发布TOF 3D超感应技术。目前尚无上市终端机采用这一技术,估计2018年下半年vivo也许会推出首款采用这一技术的商用机。
vivo发布的TOF 3D超感应技术方案
似乎在不知不觉中vivo已经成为了中国手机品牌的科技引领者,频频推出屏幕指纹技术、零界全面屏、升降式摄像头、全屏幕发声技术以及Jovi超级AI助理等一系列创新黑科技从而不断刷新着众人的目光。上海2018 MWC上TOF 3D超感应技术惊艳了众人,得到一众好评之余让大家对这一方案的商用翘首期待。

超感应技术与结构光精度比较
vivo TOF 3D超感应技术可以采集到超过30万个有效深度信息点,其精度是3D结构光技术的10倍,工作距离可达3米不仅是目前行业最高的水准,同时也通过全新的技术让大家拥有了更出色的3D成像体验。这也支撑其成为与苹果Face ID竞争的有力武器。而且该技术因为具有极高的精确度,所以不仅仅可以用在手机上面,它也可以应用于3D拍照、3D试衣、MR体感游戏、3D打印等领域,充满了想象空间。

TOF 3D的应用展望
全新的TOF 3D超感应技术很可能将为人脸、手势以及动作识别创造新的机会,从而在已经饱和的市场中杀出一条血路。不仅面部识别安全性比3D结构光技术更高,同时也可能是实现更具沉浸感移动体验的下一步。8月8日,vivo和蚂蚁金服正式宣布成立AI技术联合实验室,双方将携手在AI算法和数据方面展开研究合作,通过AI智慧手机为用户提供更加智能、安全、便捷的手机支付新体验。AI人工智能与TOF 3D超感应技术这种看似触不可及的东西,在vivo与蚂蚁金服的配合之下,将会为广大消费者带来颠覆性的智慧服务。
TOF技术的优势在于整体组件更小,不用留大刘海,识别距离更远,可以拓展更多的应用;在画面拍摄后计算景深时不需要进行后处理,通俗的讲可以避免时间延迟又可节省采用强大后处理系统带来的相关成本;具有不易受外界光干扰、体积小巧、响应速度快以及识别精度高等多重优势。劣势在于硬件成本居高不下,主要体现在组件的价格上,光子探测阵列、激光器和检测的传感器,都需要非常高端的器件。硬件技术上成本很高,再加上软件算法的成本就更高了,且目前能够提供可靠硬件产能的厂商凤毛麟角,而这一切都将推高成本。不过随着ToF技术需求的日趋爆发,ToF技术的普及与发展指日可待,所以vivo果断切入TOF技术占据先机实在勇气可嘉,连最强的苹果分析师郭明錤也曾预测2019年iPhone也许会有重大创新就包括采用ToF技术,由此可见TOF技术的先进性。
双目立体成像方案(Stereo System)
双目立体成像(Stereo System)是利用双摄像头拍摄物体,再通过三角形原理计算物体距离。已经上市的华为nova3采用的就是双目3D人脸识别方案,而且是IFAA(互联网金融身份认证联盟)提供的标准,这也是其达到支付级的主要原因。
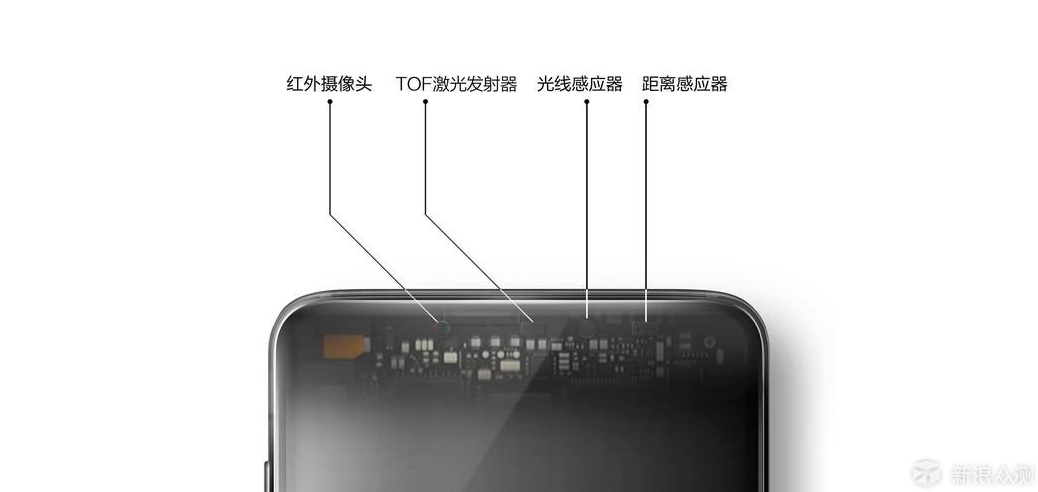
nova3刘海组建
nova3搭载的两个RGB(彩色相机)摄像头通过模拟双眼视觉系统来识别设备使用者。其实和炮兵测距所用的“跳眼法”原理相近,在电视连续剧《亮剑》中团长李云龙命令炮手柱子用迫击炮炸掉几百米外的日军指挥部,只见柱子架好炮,伸右臂,先眯左眼,再眯右眼,计算出目标距离,调整好炮口角度,装炮弹……当然炮兵只是利用这种方法进行简单的点对点测距,而先进的nova3系统得到是一个立体的面,而且会经过算法处理,形成“深度信息”进行活体检测——这就杜绝了照片、视频类平面图像欺骗设备的可能。
nova3人脸识别工作效果图
华为nova3宣城自己的人脸解锁是目前业界最高安全级别的面部解锁方式,AI人脸特征识别、双摄芯片级立体信息识别和红外生物特征识别等技术的加持,使其成为了安卓首批可以人脸支付的手机,支持支付宝人脸解锁。不过要谈到的一点是nova3在解锁时并不是3D的而是2D+红外,也就是与小米8相同的解锁方式,而支付时才是3D双目测距,因为双目测距识别方案速度相对比较慢,会影响解锁时的体验,所以2D+红外负责解锁了,而人脸支付时双目测距方案还有一个比较大的问题的就是暗光环境下并一定不能成功获取3D信息,所以这也是华为nova3还留有指纹解锁的原因,客观来说华为nova3采用的是双目立体成像和红外相结合的综合方案。
双目方案的原理最简单应该是比较早的一种人脸识别方案,方案成本最低。所有采集的深度信息都依靠摄像头所采集的图像来通过软件算法得出,精度要求取决于捕捉分辨率。同时由于这种方案需要依靠算法分析图像得到深度信息,计算负荷最大、算法复杂性最高、实现难度大,识别的速度较慢。另外它也会受到光线的影响,尤其是昏暗环境下。
总结
据查早在20世纪50年代,科学家们就已着手对人脸识别展开研究。20世纪60年代,人脸识别工程化应用研究正式开启,当时的方法主要利用了人脸的几何结构,这种方法简单直观,一旦人脸姿态、表情发生变化,则精度严重下降。经过半个多世纪的研究证明,要在实用中实现高精度的人脸识别,就必须针对人脸识别的光照、姿态、遮挡等进行针对性的解决方案。而3D结构光方案、ToF 3D方案和双目立体成像方案这三种方案只有更符合这方面的要求才有存在下去的理由,当然随着科技的发展,迟早会有替代性的方案或综合性的方案推出使得现在这三种识别方案成为历史。不过单就现在来讲,从iPhone X、小米8透明探索版和OPPO Find X3D的市场反响来看结构光这种方案是目前效果最好的,因为消费者的体验有目共睹,双目测距方案注定只能沦为中端机型的权宜之计,而有一拼的TOF技术很值得期待,但因为还只是水中花 、镜中月,所以只有等到真机的推出才能评判了,当然最终还要依赖市场的检验了。我是涧亭,希望我的文章可以为你提供有价值的信息,当然如果存在不准确的地方或您有不同见解欢迎评论指正,谢谢。